Designing controllers that allow for robustly stable, energy efficient, and fast locomotion over unstructured terrain is essential for applications, such as first response, and disaster robotics. Our research contributes to the theoretical foundations of robotic bipedal locomotion and advances the experimental state of the art as well.
On the theoretical side, a mathematical formalism for designing provably stable, walking and running gaits in bipedal robots with compliance is developed. A key contribution is a novel method of force control in robots with compliance, which results in combining the analytical tractability afforded by the hybrid zero dynamics framework, with physically intuitive compliance control to induce reliable, fast running, as well as large unexpected step-down�s while walking. This is the first formal control design, with experimental validity, for bipedal runners with non-trivial morphologies.
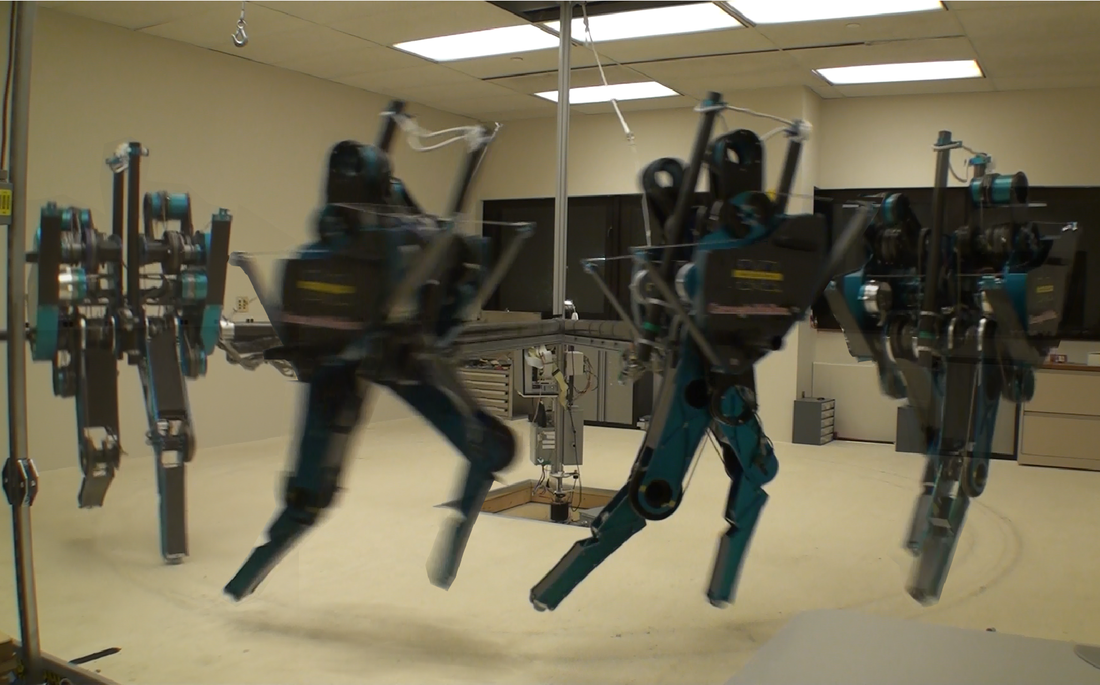
On the experimental side, the designed controllers are validated on MABEL, a planar bipedal test bed with no feet, weighing 65 Kg, 1 m tall at the hips, and having a novel transmission with compliance. MABEL is a high degree-of-freedom, nonlinear, hybrid system, with several degrees of underactuation and subject to unilateral ground constraints. Current research has accomplished the following:
Stable, robust walking - The walking controller preserves the natural compliance of the system as a dominant characteristic of the closed-loop system.
Energy efficient walking - The resulting mechanical efficiency is within a factor of 2 of humans, and over 11 times better than Honda�s ASIMO.
Fast walking - Walking at sustained speeds of 1.5 m/s (5.4 Km/hr or 3.4. mph) has been demonstrated.
Fast Running - A compliant hybrid zero dynamics based controller with active force control enabled MABEL to run at a peak speed of 3.06 m/s (10.9 km/hr or 6.8 mph), creating a world running record for bipedal robots with non-trivial morphologies in August 2011. The resulting videos were viewed over 500,000 times, with significant press coverage from CNN, ESPN, Discovery Channel, Fox, and CBS.